Использование Eddy
к сведению
- При установке Eddy, нижняя часть должна быть расположена как минимум на 1-2 мм выше сопла
- При калибровке частоты Eddy, катушечная плата должна быть на расстоянии не менее 5 мм от нагревательной пластины
- Пожалуйста, не проводите тесты при нагревательной пластине при комнатной температуре, и не включайте нагревательную пластину во время тестирования
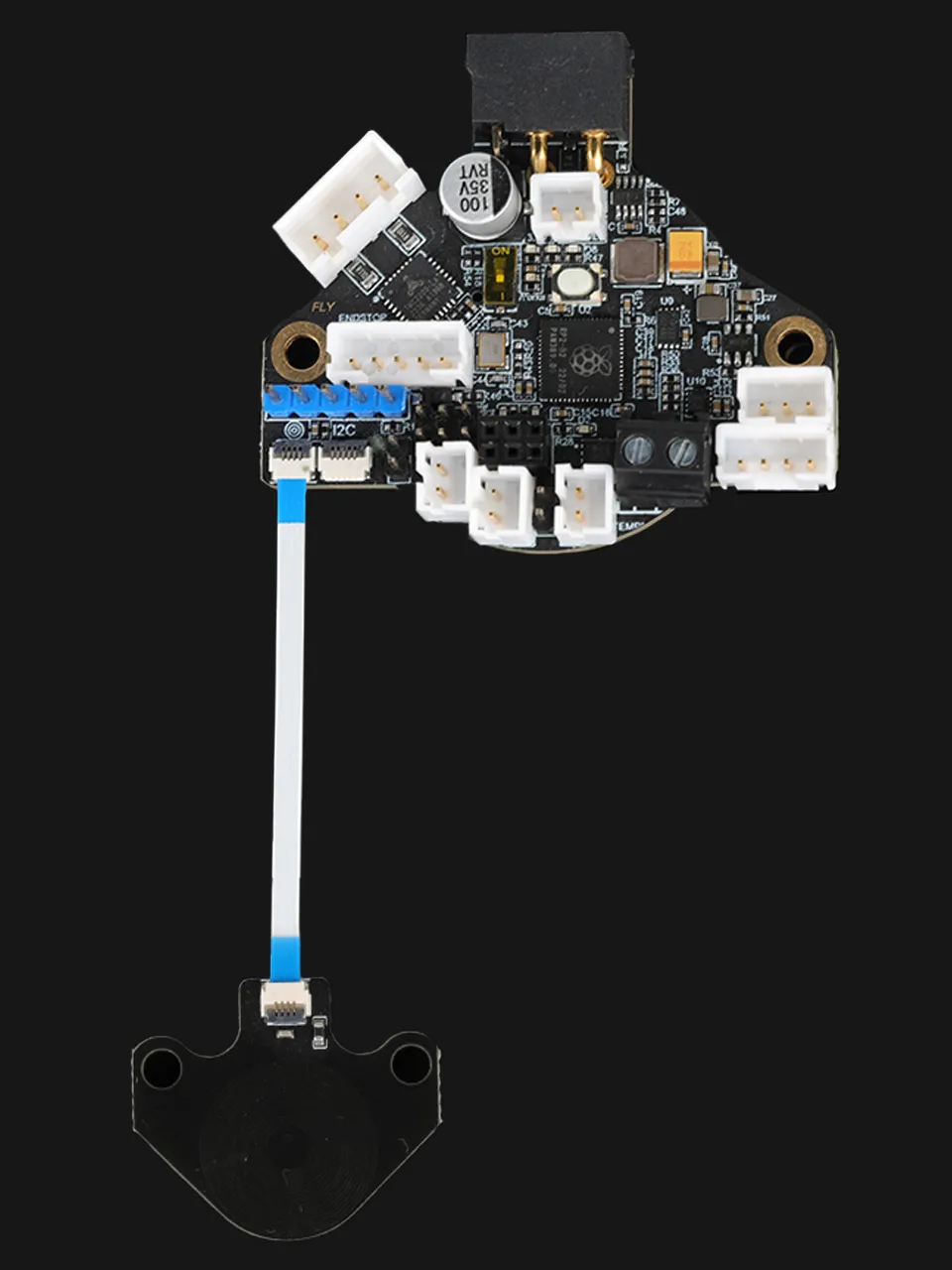
Схема подключения
- Логотипом вниз
Рекомендуемые настройки и инструкции по использованию
В файл конфигурации printer.cfg добавьте следующие настройки для отладки eddy
Конфигурация сканирования платформы
[probe_eddy_current fly_eddy_probe]
sensor_type: ldc1612
z_offset: 1.0
i2c_address: 43
i2c_mcu: SHT36
i2c_bus: i2c1e
x_offset: 0
y_offset: 0
speed:40
lift_speed: 5
- Обратите внимание, что в настоящее время внешний модуль 1612 отсутствует, поэтому данная конфигурация пока не может быть использована
[probe_eddy_current fly_eddy_probe]
sensor_type: ldc1612
z_offset: 1.0
i2c_address: 42
i2c_mcu: SHT36
i2c_bus: i2c1e
x_offset: 0
y_offset: 0
speed:40
lift_speed: 5
Конфигурация компенсации температуры
[temperature_probe fly_eddy_probe]
sensor_type:Generic 3950
sensor_pin:SHT36:gpio28
Команды для сканирования платформы
- В
printer.cfgдобавьте следующий макрос[gcode_macro BED_MESH_CALIBRATE]
rename_existing: _BED_MESH_CALIBRATE
gcode:
_BED_MESH_CALIBRATE METHOD=rapid_scan {rawparams} - Команды для локальной сети платформы, убедитесь, что Klipper может использовать функцию исключения объектов, рекомендуется добавить в начальный макрос
BED_MESH_CALIBRATE METHOD=rapid_scan adaptive=1
Конфигурация bed_mesh
- Параметр
horizontal_move_zв [bed_mesh] рекомендуется установить на 2, чтобы Eddy был как можно ближе к платформе во время сканирования
[bed_mesh]
horizontal_move_z: 2
Макросы для предотвращения столкновений
Оптимизация [quad_gantry_level] для сканирования платформы
- Если у вас настроен
[quad_gantry_level], добавьте нижеприведенный макрос в конфигурацию, если нет - добавлять не нужно - Этот макрос уменьшает высоту сканирования в зависимости от разницы высот портала
[gcode_macro QUAD_GANTRY_LEVEL]
rename_existing: _QUAD_GANTRY_LEVEL
gcode:
SAVE_GCODE_STATE NAME=STATE_QGL
BED_MESH_CLEAR
{% if not printer.quad_gantry_level.applied %}
_QUAD_GANTRY_LEVEL horizontal_move_z=10 retry_tolerance=1
{% endif %}
_QUAD_GANTRY_LEVEL horizontal_move_z=2 METHOD=rapid_scan ADAPTIVE=1
# G28 Z
RESTORE_GCODE_STATE NAME=STATE_QGL
Оптимизация [z_tilt] для сканирования платформы
- Если у вас настроен
[z_tilt], добавьте нижеприведенный макрос в конфигурацию, если нет - добавлять не нужно - Этот макрос уменьшает высоту сканирования в зависимости от разницы высот портала
[gcode_macro Z_TILT_ADJUST]
rename_existing: _Z_TILT_ADJUST
gcode:
SAVE_GCODE_STATE NAME=STATE_Z_TILT
BED_MESH_CLEAR
{% if not printer.z_tilt.applied %}
_Z_TILT_ADJUST horizontal_move_z=10 retry_tolerance=1
{% endif %}
_Z_TILT_ADJUST horizontal_move_z=2 METHOD=rapid_scan ADAPTIVE=1
# G28 Z
RESTORE_GCODE_STATE NAME=STATE_Z_TILT
Макрос для оптимизации сканирования платформы при возможной интерференции с нагревательной пластиной Eddy
- Если вы используете мощную AC нагревательную пластину (более 500 Вт)
- Следующий макрос выключает нагревательную пластину во время сканирования и снова нагревает её после завершения
[gcode_macro BED_MESH_CALIBRATE]
rename_existing: _BED_MESH_CALIBRATE
gcode:
{% set TARGET_TEMP = printer.heater_bed.target %}
M140 S0
_BED_MESH_CALIBRATE {rawparams}
M140 S{TARGET_TEMP}
Шаги отладки:
Первый шаг: изменение частоты
Изменение частоты по умолчанию ldc1612
Этот метод применим только для sht36-v3/SB2040-v3 или SB2040-Pro-v3 Вы можете использовать инструмент Mobaxterm для выполнения команд
Скачайте нужный инструмент Mobaxterm
Подробные инструкции по использованию
Выполните первую команду и нажмите Enter
sed -i 's/LDC1612_FREQ = 12000000/LDC1612_FREQ = 40000000/g' ~/klipper/klippy/extras/ldc1612.py
Выполните вторую команду и нажмите Enter
grep "LDC1612_FREQ = 40000000" ~/klipper/klippy/extras/ldc1612.py
Если замена прошла успешно, вернется строка с LDC1612_FREQ = 40000000. Если ничего не возвращается, значит замена не удалась.
Или используйте эту команду для проверки успешности

sed -n '10,15p' ~/klipper/klippy/extras/ldc1612.py

操作说明
注意事项
- 请注意需要先做电流校准后在做线圈频率校准
- 多Z轴机器需要手动调平一次做好全部校准后在进行调平一次,在重新做校准
- 下位机固件要与Kliiper版本完全一致
к сведению
- 请注意需要先做电流校准后在做线圈频率校准
- 多Z轴机器需要手动调平一次做好全部校准后在进行调平一次,在重新做校准
- 下位机固件要与Kliiper版本完全一致
- 请使用
FUIDD网页添加下方配置后在执行后面操作[force_move]
enable_force_move: true
第二步:校准EDDY 电流
- 1:在控制台输入下方命令
SET_KINEMATIC_POSITION z=80 - 2:归位X与Y 移动工具头到热床中间
G28 X Y - 上述步骤完成后,需要校准 Eddy电流,首先EDDY到移动热床中间然后喷嘴刚刚接触热床。然后在控制台执行下方命令自动获取电流,最后
SAVE_CONFIG保存参数。反馈值15左右是正常值,反馈0或者30检查是否接好(接触不良)LDC_CALIBRATE_DRIVE_CURRENT CHIP=fly_eddy_probe - 正常返回值应该在
15左右 - 校准完成后
SAVE_CONFIG保存参数
第二步:校准Eddy 频率
к сведению
- 在安装 Eddy 时,eddy ocb板要高于喷嘴需至少1-2 mm
- 校准校准Eddy频率时,线圈PCB要远离热床至少5mm
- 这里远离5mm是为了方便下一步做抽纸获取
z_offset
- 然后将喷头移动到平台中心(注意:此步骤要确保机器没有加载 heightmap)
- 开始手动 z 偏移校准 Paper test
PROBE_EDDY_CURRENT_CALIBRATE CHIP=fly_eddy_probe - 校准完成后
SAVE_CONFIG保存参数
к сведению
- 带有
z_tilt或者quad_gantry_level(QGL)功能的打印机,先调整一下平行度`i3调整一下X轴的平行度,三叉戟调整热床平行度 voron 2.4 调整一下龙门架平行度再校准一次校准Eddy频率
第三步:温度补偿
-
第三步:温度补偿 需能成功归位在开始做
-
归位所有轴
G28
- 如果有
[quad_gantry_level]或者[z_tilt],先运行一次Z_TILT_ADJUST或者QUAD_GANTRY_LEVEL后,在归位一次 - 在控制台输入G0 Z5或者通过网页等方式,将Z轴移动到热床上方
5mm - 执行下方代码将机器的
idle timeout设置长一点,避免我们升温过程的时候 timeoutSET_IDLE_TIMEOUT TIMEOUT=65000 - 执行下方指令开始校准
TEMPERATURE_PROBE_CALIBRATE PROBE=fly_eddy_probe TARGET=56 STEP=4
注意事项
- 提示:在上方命令中,EDDy目标温度设置为
56℃,适用于多数设备。 - 如果您的 3D 打印机腔体的实际温度更高,您可以适当提高目标温度。
- 请注意,目标温度越高,校准所需时间将相应延长,因为 Eddy 需要更长时间来达到温度平衡。
- 执行此操作后,UI 将显示 Z 轴调整框。请使用上述提到的手动 Z轴偏移校准(Paper Test)方法,将纸张夹在喷嘴和床面之间,然后确认该值。
- 接受值后,将热床温度调至最高,喷嘴温度调至 220℃。
- 如果您在有空调或开窗的房间中,为了确保 Eddy 的温度上升,建议关闭空调或窗户,因为风会影响温度的升高。
- 随着 Eddy 温度的上升,系统会自动提示您每隔 4℃执行一次手动 Z 偏移校准。热床温度很高,谨防烫伤!!!
- 重复手动 Z 偏移校准(Paper Test)直到校准完成。如果发现 Eddy 的温度不再上升,可以使用下面的相关命令提前结束校准。
- 在漂移校准期间可用的额外 gcode 命令包括:TEMPERATURE_PROBE_NEXT
TEMPERATURE_PROBE_NEXT用于达到EDDy设置的目标温度56℃前强制EDDy采样新数据。TEMPERATURE_PROBE_COMPLETE用于EDDy达不到设定温度56℃前完成校准。ABORT可用于终止校准并忽略结果。
- 完成这些步骤后,Eddy 将能够在广泛的温度范围内提供出色的首层打印效果!
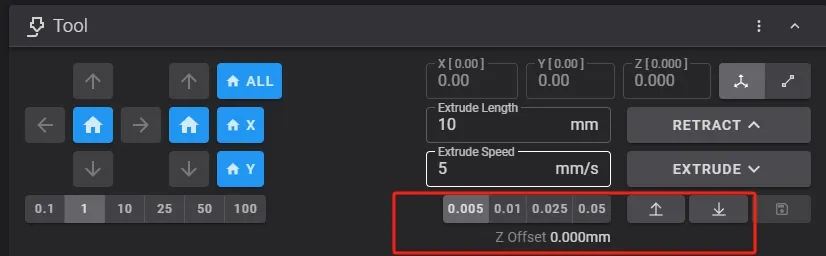
如何微调z—offset
- 第一步:使用pursa/OrcaSlicer/cura/Bambu Studio 切一个200x200高度0.2的一个方片去打印微调z—offset
- 第二步:通过打印机ip进入
fluiddmainsail找到仪表板移动控制z轴偏移继续微调z_OFFset然后记住微调的数值
- 第三步:通过下面命令重启klippper
FIRMWARE_RESTART
- 第四步:通过下面命令去调整Z—offset 弹出来的UI界面 调整
z—offset调整的数值就是打印过程中调整的数值
G28
PROBE_EDDY_CURRENT_CALIBRATE CHIP=fly_eddy_probe

к сведению
- 报错
Eddy current sensor error这个调大eddy配置里面的z_offset数值,看图例

к сведению
- 以上操作完成但是在开始做扫床失败请把z限位改成虚拟限位
线圈模型下载链接
https://cdn.mellow.klipper.cn/STEP/sen.step
https://cdn.mellow.klipper.cn/STEP/1612.step